基于 CMSIS-PACK 移植¶
1.准备工作¶
准备一份基础的裸机源码 (可通过 STM32CubeMx 可视化软件创建也可按照工程项目所需文档手动创建) 工程,如一份 stm32 包含一个支持 printf 的串口初始化代码。
基于CMSIS-PACK移植的DEMO例程地址:
github:https://github.com/Aladdin-Wang/MicroBoot_Demo
2.安装Pack包¶
在 MDK 中部署 MicroBoot 的第一步是获取对应的 cmsis-pack,对于可以流畅访问 Github 的朋友来说,通过下面的网址直接找到最新的 .pack 文件。
Releases · Aladdin-Wang/MicroBootRom
下载结束后双击文件进行安装,一路 Next 安装即可

3.添加MicroBoot到工程¶
步骤一:加入组件
在 MDK 工程中通过工具栏的快捷按钮,来打开 RTE 配置窗口:

在 Manage Rum-Time Environment 里 "Software Component" 栏找到 MicroBoot,并将其展开:
如果只想使用MicroBoot的ota功能,可以勾选ymodem_ota,如下图所示,你会发现在窗口中看到橙色的警告:
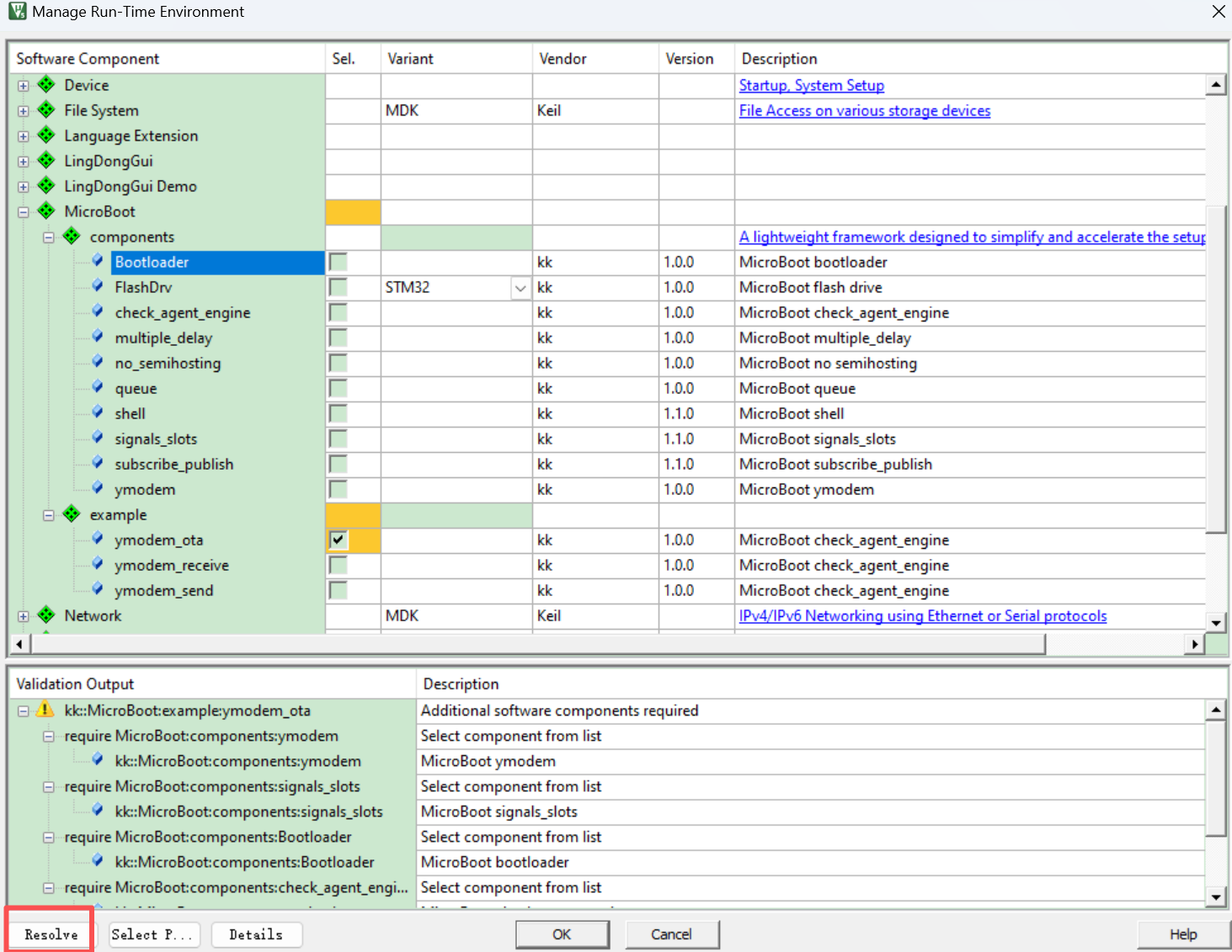
这里警告的含义是说:ymodem_ota依赖了其他模块,但你没有勾选它们。简单的单击左下角的 Resolve 按钮,RTE会自动帮你勾选上所依赖的模块。
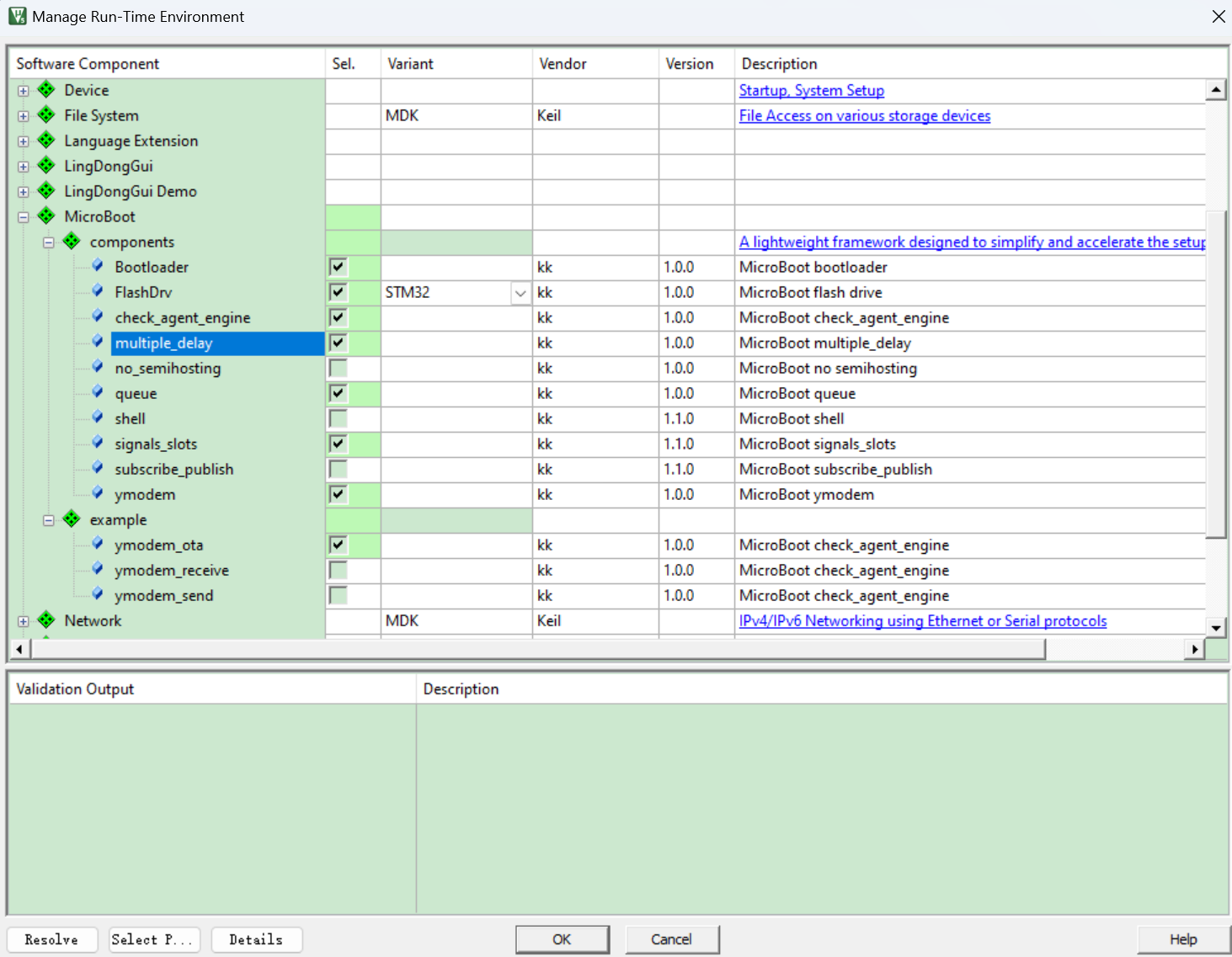
单击“OK” 按钮完成组件的添加。
根据芯片类型选择FLASH的驱动程序:

步骤二:配置编译环境
如果你使用Arm Compiler 6(armclang),则需要打开对C11和GNU扩展的支持,即直接在"Language C"中选择“gnu11”:

步骤三:模块配置
在工程管理器中展开 MicroBoot,并找到新加入的用户适配器文件(user_app_cfg.h),双击打开后,在编辑器的左下角选择 Configuration Wizard,进入图形配置界面:
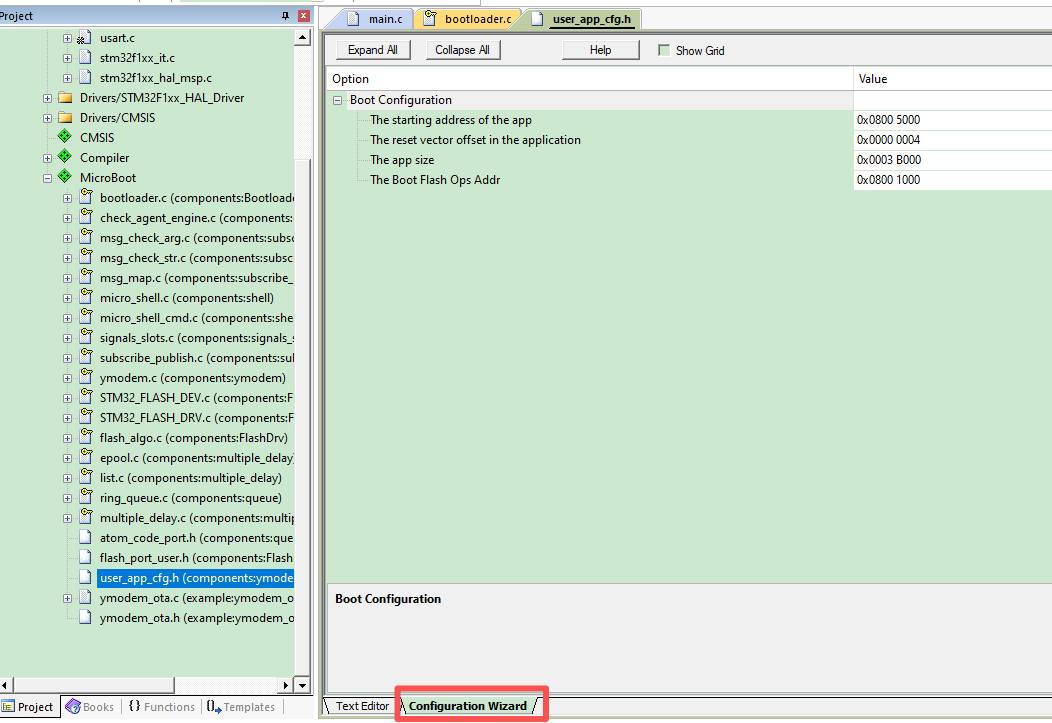
配置bootloader的参数:
- The starting address of the app:从bootloader跳转到APP的地址;
- the reset vector offset:复位向量偏移,通常为 4,默认无需修改
- The app size:APP占用FLASH的大小,必须对扇区对齐;
- The Boot Flash Ops Addr:对flash进行擦写函数的api地址;
步骤四:添加代码
假设你以串口(其他串行外设方法类似)的方式传输数据,在usart.h中,添加信号:
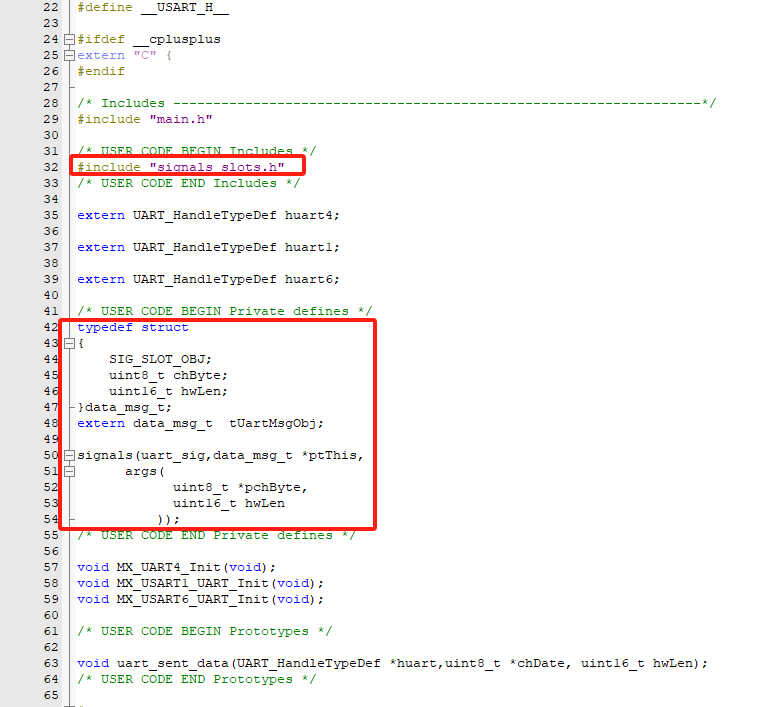
在usart.c中,添加data_msg_t的定义

打开串口接收数据中断
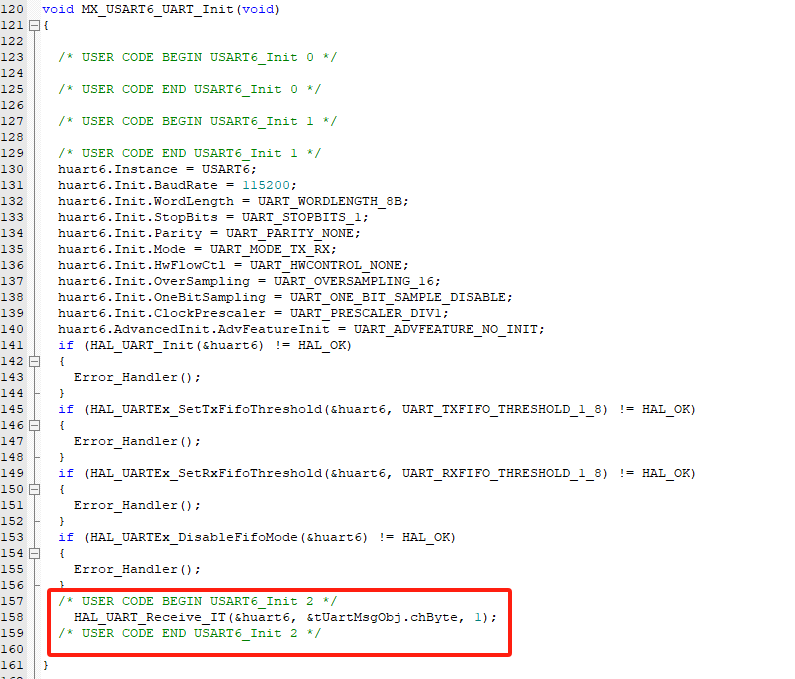
在中断接收回调函数中,发射信号:

实现一个串口发送接口:

在main.c中包含头文件:
#include "ymodem_ota.h"
#include "check_agent_engine.h"
添加对象
__attribute__((aligned(32)))
uint8_t s_chBuffer[2048] ;
static byte_queue_t s_tCheckUsePeekQueue;
static fsm_check_use_peek_t s_fsmCheckUsePeek;
static ymodem_ota_recive_t s_tYmodemOtaReceive;
实现一个获取系统运行时间的函数:
int64_t get_system_time_ms(void)
{
return HAL_GetTick();
}
在main() 函数中加入代码:
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART6_UART_Init();
/* USER CODE BEGIN 2 */
queue_init(&s_tCheckUsePeekQueue, s_chBuffer, sizeof(s_chBuffer));
init_fsm(check_use_peek, &s_fsmCheckUsePeek, args(&s_tCheckUsePeekQueue));
ymodem_ota_receive_init(&s_tYmodemOtaReceive, get_read_byte_interface(&s_fsmCheckUsePeek));
agent_register(&s_fsmCheckUsePeek, &s_tYmodemOtaReceive.tCheckAgent);
connect(&tUartMsgObj, SIGNAL(uart_sig), &s_tCheckUsePeekQueue, SLOT(enqueue_bytes));
connect(&s_tYmodemOtaReceive.tYmodemReceive, SIGNAL(ymodem_rec_sig), &huart6, SLOT(uart_sent_data));
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1) {
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
check_use_peek_task(&s_fsmCheckUsePeek );
}
/* USER CODE END 3 */
}
步骤五:验证升级功能
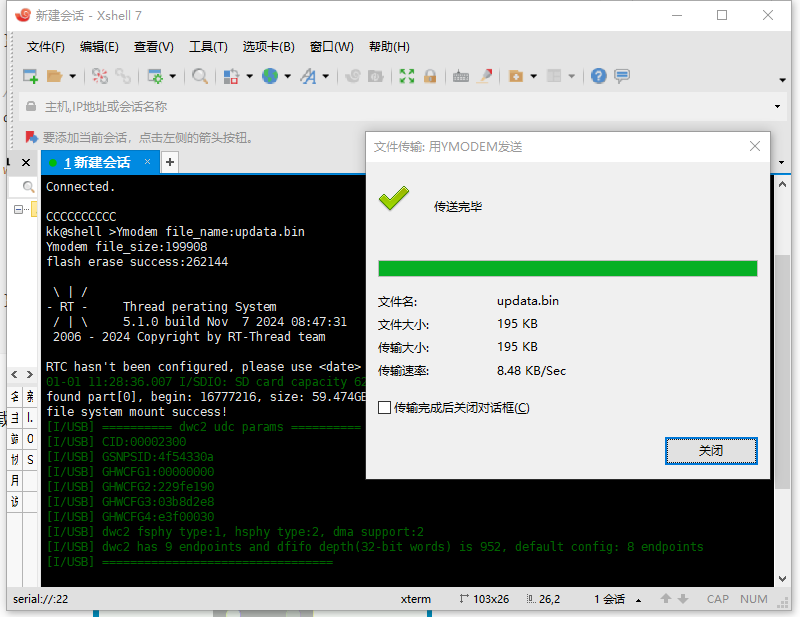
以上就完成了对 MicroBoot 模块基本功能的配置,编译下载,如果一切顺利,你应该可以在串口助手中看到3秒钟打印一个字母“C”。

使用 Xshell等带有Ymodem协议的串口助手,来下载文件:

或者直接使用MicroLink进行下载,MicroLink内置Ymodem协议,将需要升级的bin文件,直接拷贝到虚拟U盘中,即可自动完成下载。

4.添加shell命令行工具到工程¶
添加shell组件:

在main.c中添加头文件:
#include "micro_shell.h"
添加micro_shell的对象,并实现shell读写数据的函数
static check_shell_t s_tShellObj;
uint16_t shell_read_data(wl_shell_t *ptObj, char *pchBuffer, uint16_t hwSize)
{
peek_byte_t *ptReadByte = get_read_byte_interface(&s_fsmCheckUsePeek);
return ptReadByte->fnGetByte(ptReadByte, (uint8_t *)pchBuffer, hwSize);
}
uint16_t shell_write_data(wl_shell_t *ptObj, const char *pchBuffer, uint16_t hwSize)
{
HAL_UART_Transmit(&huart6, (uint8_t *)pchBuffer, hwSize, 100);
return hwSize;
}
在main函数中注册shell
shell_ops_t s_tOps = {
.fnReadData = shell_read_data,
.fnWriteData = shell_write_data,
};
shell_init(&s_tShellObj,&s_tOps);
agent_register(&s_fsmCheckUsePeek, &s_tShellObj.tCheckAgent);
完成以上,下载后便可使用命令行功能
